Poly II
Project finished
This robot is the spiritual ancestor to the now scrapped robot Polyfemos. Very few parts from the original bot remains, but I choose
to let it keep the name anyway. This robot uses a suneater mechanical layout with a suneater 5 SE. Due to bad effiency of the motors
I wired a couple of electrolytic caps of 800 uF in parallell with the dynacap. This helps the motors start. The suneater layout is far superior to the "bug-like" layout. It never gets stuck and backs off without reversing the motors. I must also recommend everyone to build one
of the suneater series by Steven Bolt, truly impressive solarengines.
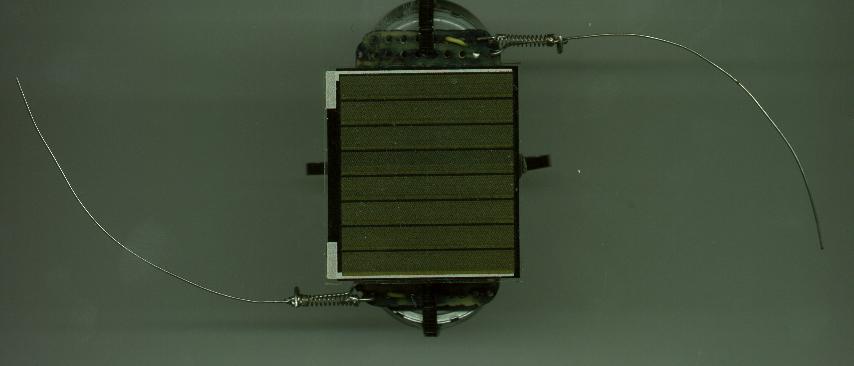
Specifications:
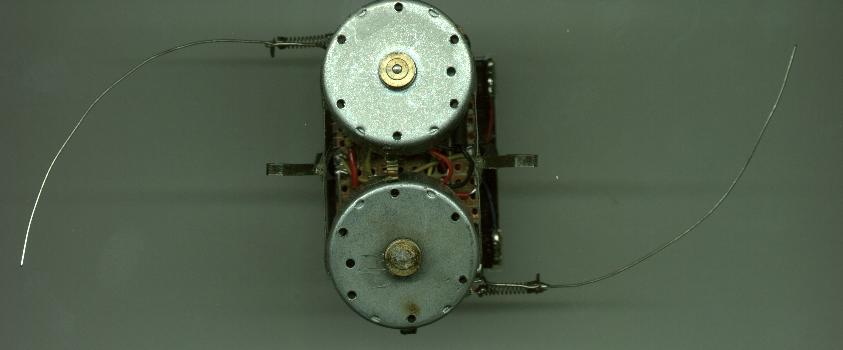
Motors: Two motors from scrapped walkmans
Sensors: Photodiodes and feelers
Capacitor: 47000 uF dynacap + 800 uF electrolytic
Solarcell: Panasonic Sunceram 33*37
Solarengine: Suneater 5 by Steven Bolt.
Contruction time: aprox 10 h