Blue
Project finished (re-opened and finished again due to bad electronics)

Blue is a two motor solarpowered walker. Originally he was supposed to have a feeler and tilt-switch in addition to his photodiodes,
but these were dropped as I never got the reverser working satisfactory. The bot lived with a standard microcore (see schematics below) for something like three years, but one day I sat down and decided that it was time to rebuild it. The microcore was replaced with a master/slave bicore, and the fixed on/off timer was replaced with a Miller-type solar engine. Since a namiki motor had worn out, I replaced it with a FW11 along with the frame for better looks. I also gave the bot a feeler and reverser acording to the original plan. The bot is finished, I've done some tests with the bot on a tether, and it walks alright (although it seems like it almost walks better in reverse...). One thing I've noticed with simple 2-motor walkers like this is that the leg-design (and as a result of this, the center of gravity) is VERY important. A small adjustment of the leg shape can mean the difference between an effective walking gait and not moving at all. The bot is finished, since I gave it the caps from my picbot that didn't work anyway. In full noon summer sunshine (in Sweden, so not very intense) the bot takes 5-6 steps every 25-30 seconds. Terrain handling ability isn't that great. When it takes to big steps, it often triggers the feeler, making the bot seem kind of nervous (a couple of big steps forward, then it backs up).



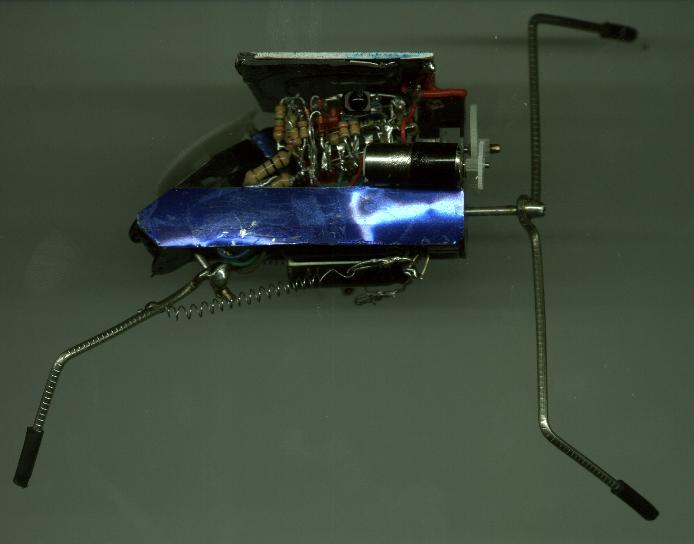
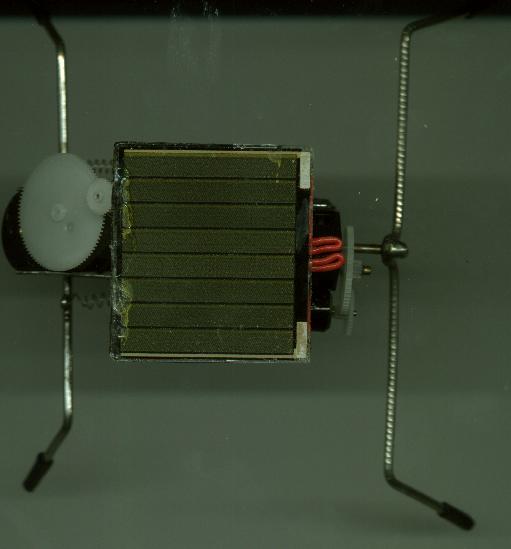
These pictures show the finished chassis with bicore and motordrivers installed, the front of the bot with the feeler, front leg feedback springs and the front gearbox, and the rear gearbox.

 Here we can se the caps, the solarengine on top of the caps, and the motordrivers. The picture on the right show the very heart of the robot, the 240 with the bicore, and the rearleg centering springs.
Here we can se the caps, the solarengine on top of the caps, and the motordrivers. The picture on the right show the very heart of the robot, the 240 with the bicore, and the rearleg centering springs.

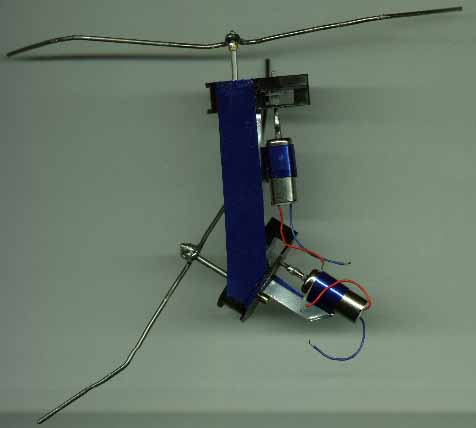
 These pictures show old versions of the bot.
These pictures show old versions of the bot.

This is a picture of the first layout I tried, but the motors didn't have enough torque:
And here is a closeup of the original brains, a standard quadcore with long time PNC and photodiodes in series with the resistors:

This is the old schematics, handdrawn and scanned. Not pretty, but click on it for a larger version.

Specifications:
Motors: Two pager motors (one namiki one mabuchi FW11) with modified toy gearboxes
Power storage: 2* 1F goldcells in series
solarcell: Panasonic 37*33
Brains: Master/slave bicore on HC240, HC245 surface mount motor drivers, Miller-type solar engine
Sensors: Feeler switch wired to back up circuit
Construction time: Way to long...
